
How quadcopters fly is something we’ve been asked over and over. A quadcopter is essentially a helicopter which has motors that are equally spaced, arranged on the corners of a square (X) body. Unlike helicopters, multirotors are inherently very unstable without electronic assistance because it is extremely herculean to control multiple rotors manually. The decrease in cost of modern microprocessors lead to these machines getting popular in the recent years. In this article, we will cover how quadcopters work. The concepts discussed here apply to almost any kind of multirotor but to keep things simple, we’ll stick to using quadcopters to demonstrate the concepts.
Basics
Basic components of a quadcopter/multirotor

The body/frame
The frame or body is what holds everything together. They are generally designed to be strong and lightweight and consist of a center plate where the main flight controller chip and sensors are mounted and arms where the motors are mounted. It is most often made of carbon fibre, fibreglass, aluminium or steel. Some cheaper, smaller models also use plastic.
The frame comes in varieties for different multirotor types: Tricopter, quadcopter, hexacopter, octocopter. It also varies on different builds, depending on whether it is used for aerial photography, FPV drone racing etc.
Motors
The motivation behind using motors is to turn the propellers, which is responsible for providing thrust for countering gravity and drag. Every rotor ought to be controlled separately by a speed controller. Motors are the the primary force behind how quadcopters fly.
They are somewhat like typical DC motors in the sense that coils and magnets are utilised to drive the shaft. The brushless motors do not have a brush on the shaft that deals with iterating the power in the coils, hence, the ‘brushless’ reference.
The brushless motors have 3 coils on the inside center of the motor, which is settled to the mounting. On the external side, it contains multiple magnets mounted to the cylindrical structure that is appended to the turning shaft.
Hence, the coils are fixed and there is no need for brushless. Brushless motors turn a lot quicker and utilize less power at the same speed relative to DC motors. Unlike DC motors, they don’t lose power in the brush-transition, so it is a lot more vitality productive.
The Kv (kilovolts) – rating in a motor demonstrates how various RPMs (Revolutions each moment) the motor will do per volt. The higher the kV rating is, quicker the motor rotates at a steady voltage.
ESCs
Motors spin, but in order to fully understand how quadcopters work, we need to understand how the motor is controlled. The electronic speed controller or (ESC) is what tells the motor how to spin. It is responsible for controlling the rate at which the motor it is connected to, spins. Since the multirotor motors are supposed to spin at variable speeds, depending on control inputs, ESCs are crucial. In a multirotor, each motor will have an associated ESC connected to it.
The ESCs are connected to the batteries via the power distribution board within the multirotor’s frame. Most ESCs come with a battery eliminator circuit (BEC) which acts as a voltage regulator, allowing other electronic components like the flight controller and receiver to power up without connecting them directly to a battery.
Flight Controller
The flight controller is the mind or ‘brain’ of the multirotor. This board is what sits at the center, controlling the firmware within the ESCs, consequently controlling the spin rate of the motors. This is how a quadcopter flies.
Essentially, it takes the inputs from the receiver (Throttle, Elevator, Rudder and Aileron) and adjusts the motor RPM accordingly, via ESC.
Flight control systems house additional sensors to enhance control and stability of the craft. The controller usually contains gyroscope, accelerometer and barometer. GPS can also be added onto the flight controller to feed coordinate information and altitude information of the multirotor.
The following is the sequence of how quadcopters work: Flight controller -> EScs -> Motors.
Transmitter and Receiver
The radio transmitter and receiver is used to control the quadcopter. In order for a quadcopter to work, four channels (throttle, elevator, aileron rudder) are required. Getting a transmitter with 6 or 8 channels is recommended for additional functionalities.
Quadcopters can be programmed and controlled in totally different ways. However the most common ones are in either rate (acrobatic) or stable mode. In rate mode, only the gyroscope is used to control the quadcopter balanced, it does not self-level.
If switched to stable mode, the accelerometer gets activated, helping to stabilize the quadcopter. The speed of the 4 motors can be adjusted automatically and perpetually to keep the quadcopter balanced.
A transmitter may also have an FPV screen on which a camera mounted on the multirotor beams video in real time. This gives the pilot a unique experience of flying by seeing what the multirotor sees.
Batteries
Lithium Polymer (LiPo) batteries are the most famous power source for controlling multirotors (or ‘drones’) today. Without going a lot into detail, the principle explanation behind this is on the grounds that they are rechargeable and ordinarily have expansive limits.
LiPo batteries can have discharge rates sufficiently expansive to control even probably the most taxing multirotors. This settles on them the favoured decision over different choices, for example, the Nickel Cadmium (NiCd) battery. This is likewise the essential reason they can be a genuine fuel source for multirotors.
How quadcopters fly : drag, thrust and lift
Before getting into the specifics how multirotors fly, it is important to understand what drag, thrust and are:
Drag
‘Drag’ is essentially a mechanical force that opposes the motion of any object through a fluid. In this context, since we are talking about multirotors passing through air, it is called ‘aerodynamic drag’ (as opposed to ‘hydrodynamic drag’ (for objects passing through water).
Aerodynamic drag on multirotors is generated due to the difference in velocity between the multirotor and the air. This is only if the quadcopter/multirotor is in motion (going up, down, forward, backward and taking turns) relative to the air. If the multirotor is stationary, there is no drag.
This drag force and the weight of the multirotor is what is need to be overcome, in order for the craft to get up in the air and move around.
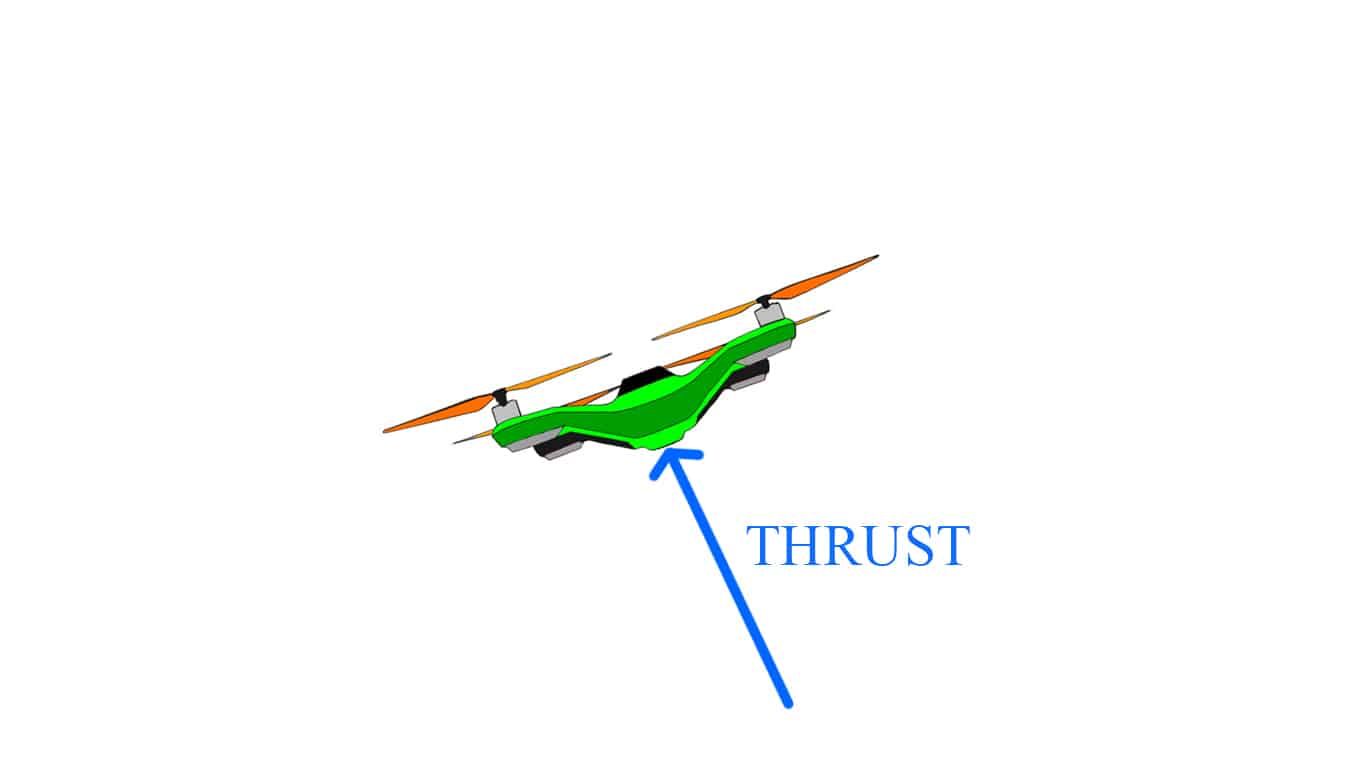
Thrust
‘Thrust’ is the force generated by the propellers of the multirotor, in order to work against one of the forces that need to be overcome: the drag. Note that the thrust force is not the main force responsible for getting the multirotor up in the air. Instead, it is the force that lets the multirotor travel within the air, which is a fluid, overcoming its drag resistance.
Lift
The lift is the force that acts against the weight of the craft, taking it up in the air. Like we covered in the quadcopter blade rotation and lift post, The following are responsible for the lift in a wing:
- Newton’s third law (every action has an equal and opposite reaction) – generates a lift in a wing at the bottom, since the mass of air is pushed down and back (lift and drag).
- Bernoulli’s explanation is incomplete, but the pressure difference between the air at the top and at the bottom due to the Coanda Effect generates a lift towards the lower pressure at the top (read more in the quadcopter blade rotation post).

The propellers on the multirotor generates a ‘lift’ force using similar principles (pushing the air downwards and the difference in air pressure). In order for the multirotor to get off the ground and be able to hover and fly around, this force must be greater than the weight of the craft.
How do quadcopter motors interact and rotate to make the craft fly desirably?

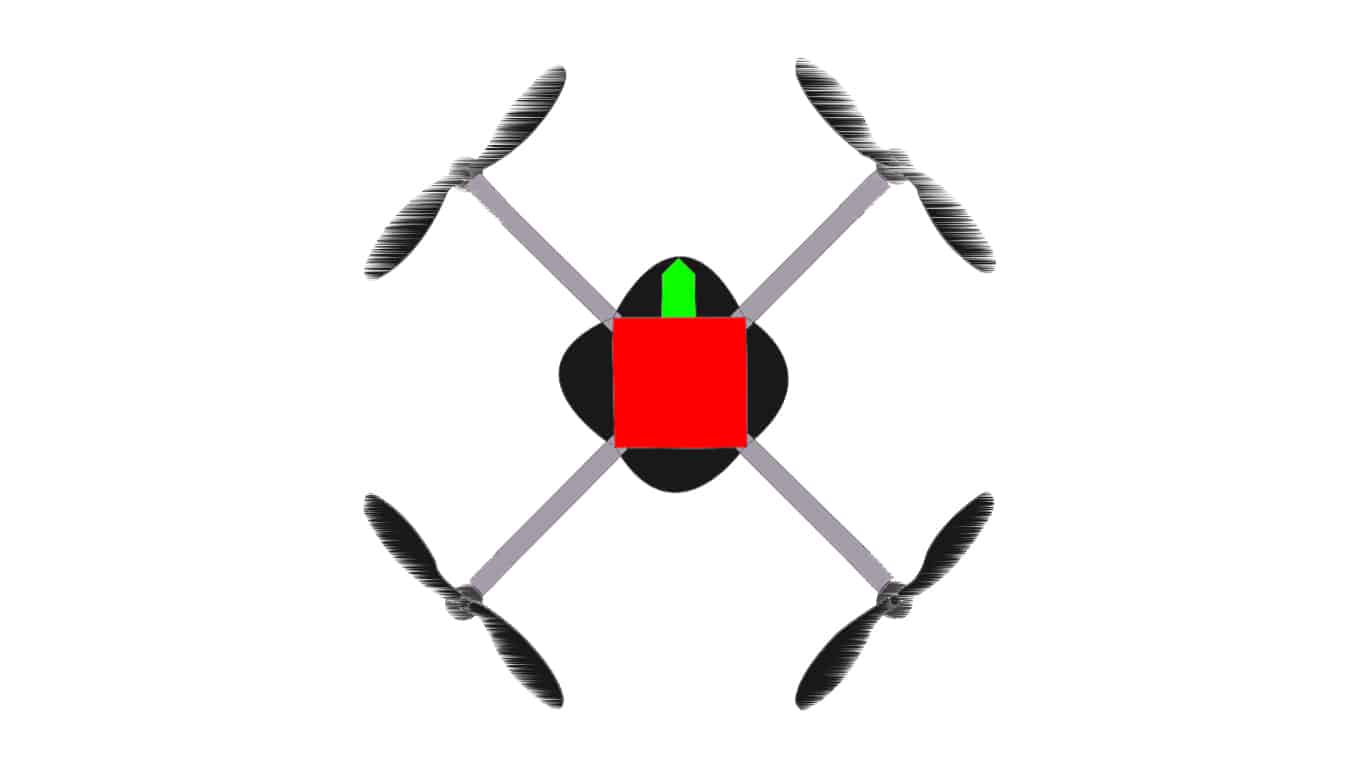
In a quadcopter, there are four motors placed at the edge of four arms of the frame. The direction of each motor’s rotation is such that it counteracts the torque generated by the motor that is placed at the opposite side. This is how the quadcopter keeps from spinning due to torque effect – the torque generated by each of the motors cancels out.
How do quadcopters/multirotors hover?
In order for the quadcopter to hover in place, it is necessary to ensure that:
- All the motors rotate at the same speed (or RPM)
- The rotation speed must be sufficient enough for the quadcopter to generate a ‘lift’, counteracting its own weight, but not so much that the quadcopter keeps climbing in altitude.
- The torque effect acting on the body of the quadcopter by each of the motors should be cancelled out. Otherwise, expect the quadcopter to tend to want to yaw in a certain direction.
Gaining and losing altitude
So how do quadcopters fly high? In order for the quadcopter to gain altitude, all four of the motors must increase the speed of rotation simultaneously. Conversely, to descend down, all four of the motors must decrease speed of its rotation simultaneously.
This is what happens when you increase or decrease the elevator control on your transmitter – the speed of the motors change simultaneously.
Pitch

The ‘pitch’ control tells the quadcopter whether to fly forward or backward. In order to pitch forward for example, the speed of the motors at the rear of the quadcopter must increase, relative to the speed of the motors on the front. This ‘pitches’ the nose (front) of the quadcopter down, resulting in the forward movement.
This is achieved by either increasing the speed of the rear motors or decreasing the speed of the front motors. Conversely, in order to ‘pitch’ backwards, the speed of the motors at the front of the quadcopter must increase relative to the speed of the motors at the back.
Roll

The ‘roll’ control tells the quadcopter to move side to side. In order to ‘roll’ to the right for example, the speed of the motor at the left of the quadcopters must increase, relative to the speed of the motors on the right. This ‘rolls down’ the right side of the quadcopter, resulting in a side-ways swaying movement.
Like pitch, this is achieved by either increasing the speed of the left motors or decreasing the speed of the right motors. Conversely, in order to ‘roll’ left, the speed of the motors of the right of the quadcopter should increase relative to the speed of the motors at the left.
Yaw

The ‘yaw’ or ‘rudder’ is a rotation movement of the quadcopter. In this case, the rotation speed of diametrically opposing pairs of motors are increased or decreased, varying the torque in the direction of rotation of that pair (remember that diametrically opposing motors in a quadcopter rotate in the same direction), causing the quadcopter to rotate in the direction of the increased torque.
The drone and Flight controllers
As discussed before, the flight controller is the mind or ‘brain’ of the multirotor. This board is what sits at the center, controlling the firmware within the ESCs, consequently controlling the spin rate of the motors. The quadcopter cannot function optimally without sensors added to the flight controller. In order to understand how quadcopters work, it is essential to pick it’s brain!
Most important sensors and their roles
Accelerometer
The accelerometer measures the change in the object’s speed (to tell whether it is going up or down). It senses both static gravity acceleration (which happens even when the object is not actively moving) and dynamic acceleration, to detect motion.

The unit of measurement used is g (9.8 m/s^2) or in metre per second squared. Note that the accelerometer measures acceleration in three different axes in the 3D world (x, y and z axes). The accelerometer senses both what direction the ground is, by sensing the earth’s gravitational pull and linear motion.
Gyroscope
Unlike the accelerometer, the gyroscope measures the rate of rotation of an object about its axis, in degrees per second or rotations per minute (RPM). The gyroscope is mounted on the quadcopter in a way that it is aligned with its axes, giving information on the orientation of the quadcopter.
Three axes of rotations are measured (roll, pitch and yaw).
Inertia measurement unit (IMU)
In order to accurately measure the orientation, velocity and location of the quadcopter, an accelerometer or a gyroscope alone may not be enough. This is where the inertia measurement unit (IMU) comes in.
The IMU is a board that combines both multi axes gyroscope and accelerometer to get the best of both. The IMU may also contain a magnetometer to correct the errors in the gyroscope feedback.
How quadcopters fly better : Additional options
Barometer
The barometer is essentially a pressure sensor that senses changes in air pressure. As you may know, air pressure changes with altitude. Barometer can detect even the smallest changes in pressure and so can be used to measure the altitude of the quadcopter. This is becoming increasingly important these days, with the advent of new regulations.
GPS
The global positioning system (‘GPS’) receives data from multiple satellites that are in orbit around the earth in order to pinpoint the geographical location of the quadcopter. With the GPS system in place, you can even set specific coordinates for your quadcopter to fly to. GPS also enables the RTH (return to home) function which enables your craft to fly back to you in case it flies beyond your line of sight and beyond your controller’s range.
Magnetometer
The magnetometer is used to measure the earth’s magnetic field (like a compass). This sensor usually serves the purpose of correcting the drift of the gyro and also to serve as an ancillary to the GPS system.
Distance
Distance sensors use ultrasonic or light based systems to complement the barometer in order to give a more accurate reading of the altitude. These sensors can also tell if the quadcopter is about to collide with a building, a lamp post and son on.
How quadcopters work: Quadcopter/Multirotor working principle and basic physics
So far, we have covered the very basics of how quadcopters work. Here we will dive into some of the physics behind it. The quadcopter working principle and physics we are going to cover is by no means going to be exhaustive, but we’ll discuss some basic mechanics underlying the quadcopter. In order to truly understand how quadcopters work, it is essential to delve deep into the mathematics.
Physics of the hover
As we have already covered, the quadcopter has four rotors that act to support the craft’s weight. This is how quadcopters fly Each rotor in the quadcopter spins to generate thrust force (which we will denote here as F).
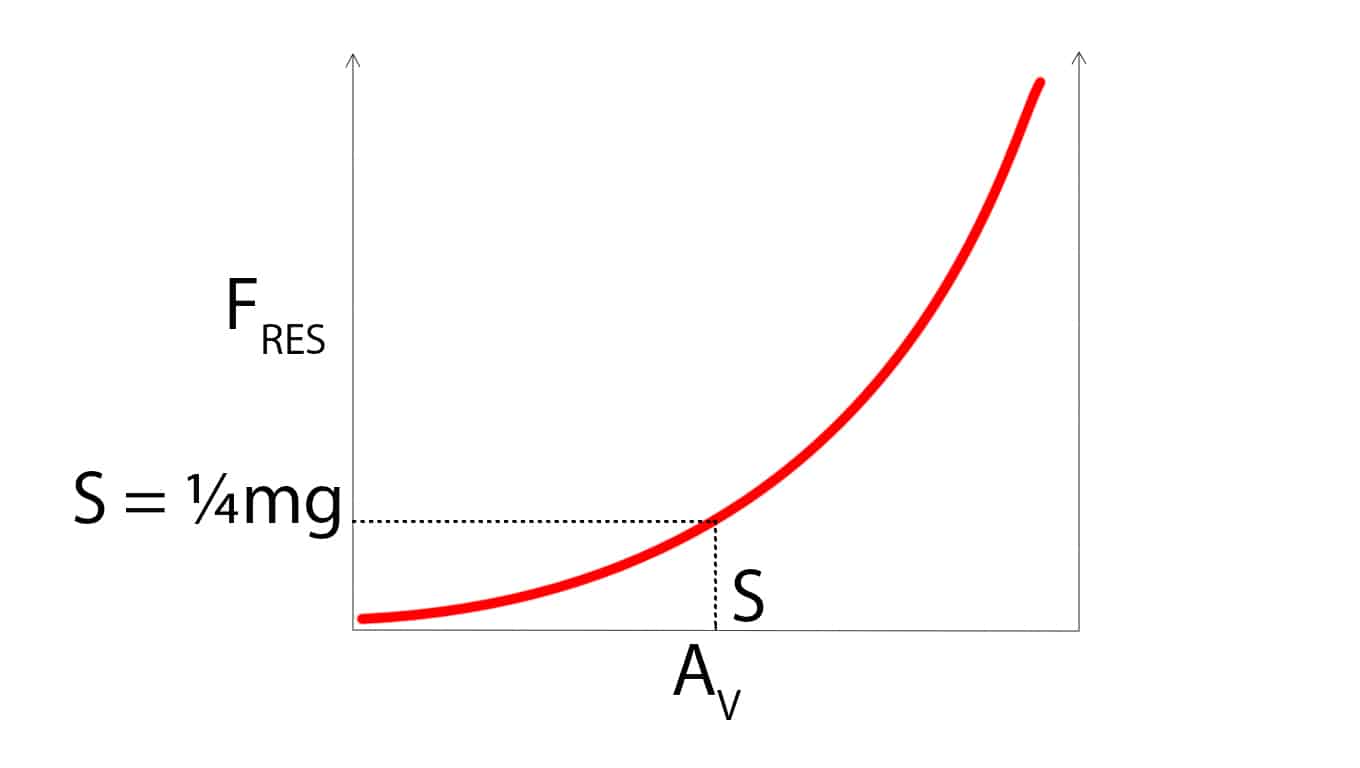
The relationship between this thrust and the RPM of the motors or the angular velocity (Av) is approximately quadratic. That is, FRes = K * Av^2 (where K is some constant).

We have also established what a drag is. Each rotor in a quadcopter has to overcome drag every time it spins. And as you may already know, a moment is the ability to make an object rotate (torque). The relationship between the RPM and the drag moment (T) is also quadratic. That is, T = K * Av^2

Since the quadcopter has four rotors, every rotor has to account for 1/4th of the total weight of the quadcopter, in order to hover. Hence, if you go back to the curve from the first graph (thrust vs RPM), you can elicit the speed that each rotor needs to spin in (S = ¼ Mass of the quadcopter * acceleration by gravity).
That speed of rotation however, has to overcome the drag moment. This is where the problem of picking the appropriate size of the motor comes in. The size of the motor is chosen in a way that it can produce enough torque to counter this drag moment.
When the quadcopter is in a state of hover, the speed of each of the rotors compensate for the weight. After you have determined the speed (S) of each rotor, from this, you can determine the torque each of the rotor.

The resultant force of the spinning of the rotors on the quadcopter is the sum of all the thrust forces by the four rotors, minus the force of the gravity (Fg = mg), where m = mass of the quadcopter and g = acceleration by gravity (9.8 m/sec^2).
FRes = F1 + F2 + F3 + F4 – mg
In case of the hover, this resultant force is zero (FRes = 0)
If we have determined the center of mass of the quadcopter, you can also calculate the total moment (torque) around that center resulting from the thrust forces.
M = r1 * F1 + r2 * F2 + r3 * F3 + r4 * F4 + M1 + M2 + M3 + M4 (where M1…M4 are moments around the rotors themselves and r1*F1…r4*F4 being the moments that are the reactions from the rotation of the rotors in clock wise and anti-clockwise direction.)
Acceleration and deceleration
In order for the quadcopter to accelerate or decelerate, the resultant force and moment has to be non-zero. For example, for the quadcopter to vertically ascend, the resultant force has to be non-zero, increase the motor speed while keeping the thrust of the motors equal.
Mass * acceleration (ma) = FRes
Similarly, if you reduce the motor speeds, the quadcopter will descend.
Hence, a combination of the motor thrusts and the weight of the quadcopter determines the direction of the acceleration.
PD (Proportional and Derivative) and PID control
Understanding this is very important to truly understand how quadcopters work. Since we need a FRes = ma to ascend or descend the quadrotor to a desired height x, we can write a (acceleration) as a = d^2x/dt^2 (second order derivative) = x’’.
Also, let us introduce u = 1/m * FRes.
Therefore, we now have a second order derivative equation with the input as ‘u’ and the variable x, such that u = x’’ (since 1/m*FRes = a = x’’). That is, second order dynamic system, u = x’’.
The goal here now is to determine the input ‘u’ such that the quadcopter goes to the desired position x. That is to find a control input u (t) so that x (t) follows the desired trajectory xdes(t).
The difference between the desired trajectory of the quadcopter and the actual trajectory is the error of the trajectory.
That is, e (t) = xdes (t) – x (t).
Our goal is to minimize the error, making it converge exponentially to zero.
Hence, to do this, we find u (t) such that,
e’’ + Kv * e’ + Kp * e = 0 where Kv, Kp > 0
By finding values of K that are > 0, we can guarantee that the error will go exponentially to 0.
The equation for the control input is given by u (t) = x’’des (t) + Kv * e’ (t) + Kp * e. With this, the error will converge exponentially to 0 and ensure that our desired trajectory is achieved. Here, Kp * e is the proportional gain while the Kv * e’ (t) is the derivative gain (since e’ is the derivative of the error, e here). The x’’des (t) is the feed forward term, which is the second derivative of the xdes(t).
This is the control law, PD control law that is used to drive the motors of the quadcopter. With this in application in the code, the quadcopter trajectory may first start off with a slight error, but will eventually converge to 0 error, even if the error offshoots to the negative direction.
The proportional control acts like a spring. The higher the proportional term in the control law equation, the springier the quadcopter gets. Higher the proportional gain, the more likely the quadcopter is to offshoot its trajectory to negative error.
The derivative control acts like a dampening agent. High derivative gain will make the quadcopter converge its error to zero very slowly but is less likely to offshoot its trajectory to negative error.
PID Control
In cases where there are external disturbances like wind or presence of unknown errors such as the mass of the quadrotor being unknown, PID control is used, which is a more complex version of the PD control. This is how quadcopters work better today.
The equation for this is u (t) = x’’des (t) + Kv * e’ (t) + Kp * e + Ki
Where is the extra term. Note that this equation goes into the third order derivative.
For the PD system, when Kp and Kv > 0, the quadcopter becomes stable.
When Kp > 0 and Kv = 0, the quadcopter becomes marginally stable.
When both the values < 0, the quadcopter becomes unstable.
How to make the quadcopter agile?
Acceleration and stopping
So far, we have covered how quadcopters work. But on order for it to be agile, it must have the capability to accelerate quickly and come to a sudden stop. What this means is, when the quadcopter is accelerating, it pitches forward and when it is time to stop, the quadcopter has to pitch in the opposite direction quickly, in an aggressive angle.
This causes a reversing of the direction of thrust, getting maximum deceleration. It is also necessary to minimize the stopping distance.


Quick change in direction
The quadcopter must also be able to turn quickly without slowing down. That is, minimize the turning radius. This is essential in making sharper and steeper turns.
Conclusion
The field of quadcopters, autonomous robots and its applications is vast and extremely interesting. This article obviously only scratches the surface of how quadcopters work and fly, but it is our hope that it covered enough to get you started. If you are a beginner looking to get into to multirotors, we recommend you get a cheap RTF multirotor.
If you liked this article, please do help us by sharing it!